3回目まで、PID制御の仕組みについて説明してきました。今回は、PID制御が、電子機器における制御で、どのような利点があり、なぜ広く使用されているのかお伝えしたいと思います。
まず、ここまで実施してきたPID制御の仕組みを計算式に表してみます。
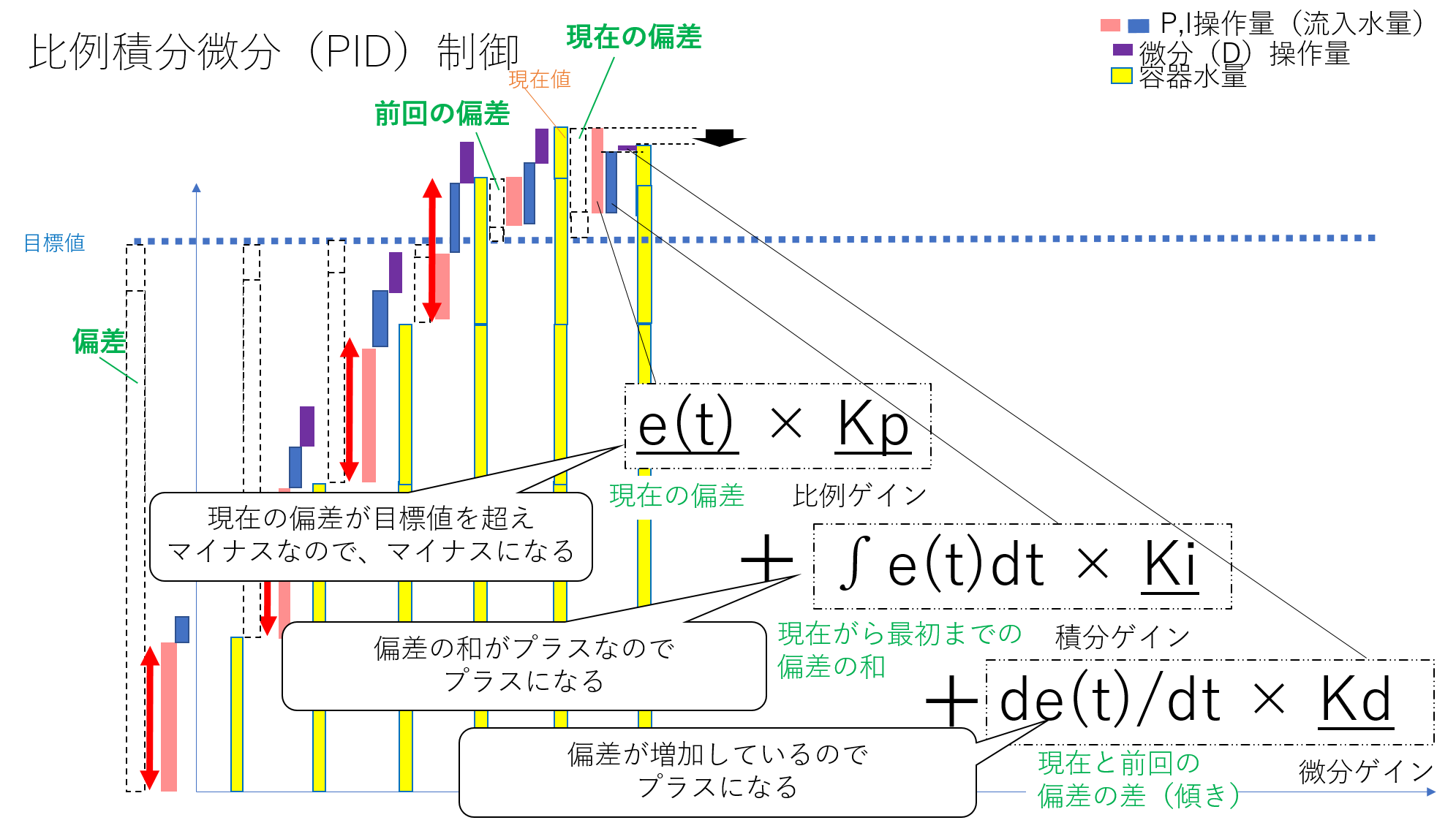
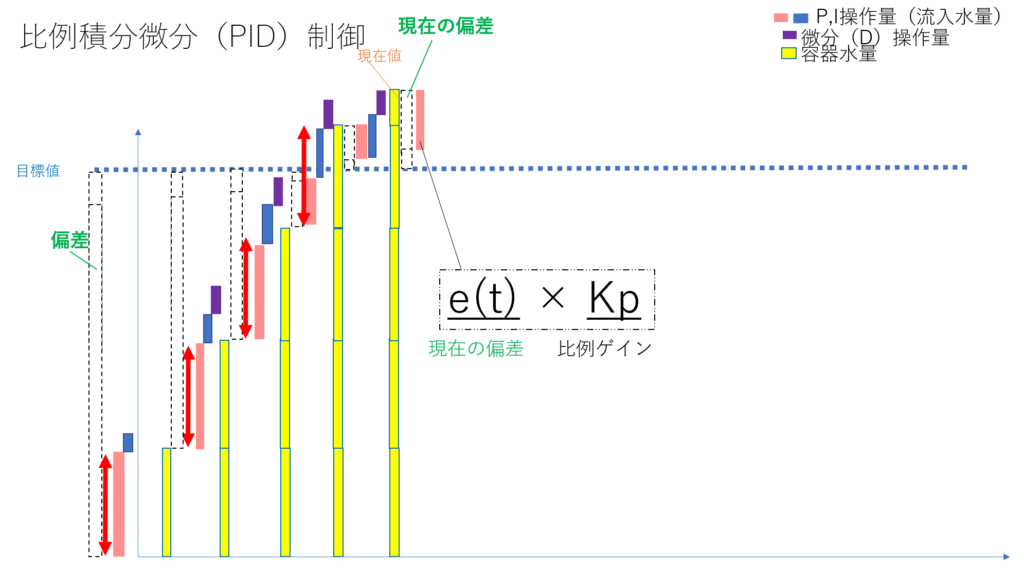
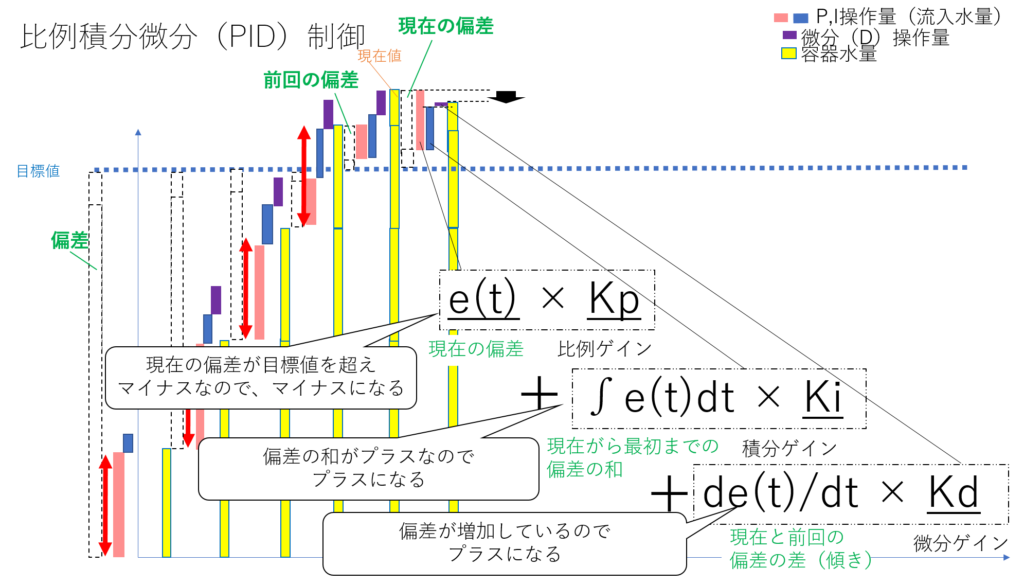
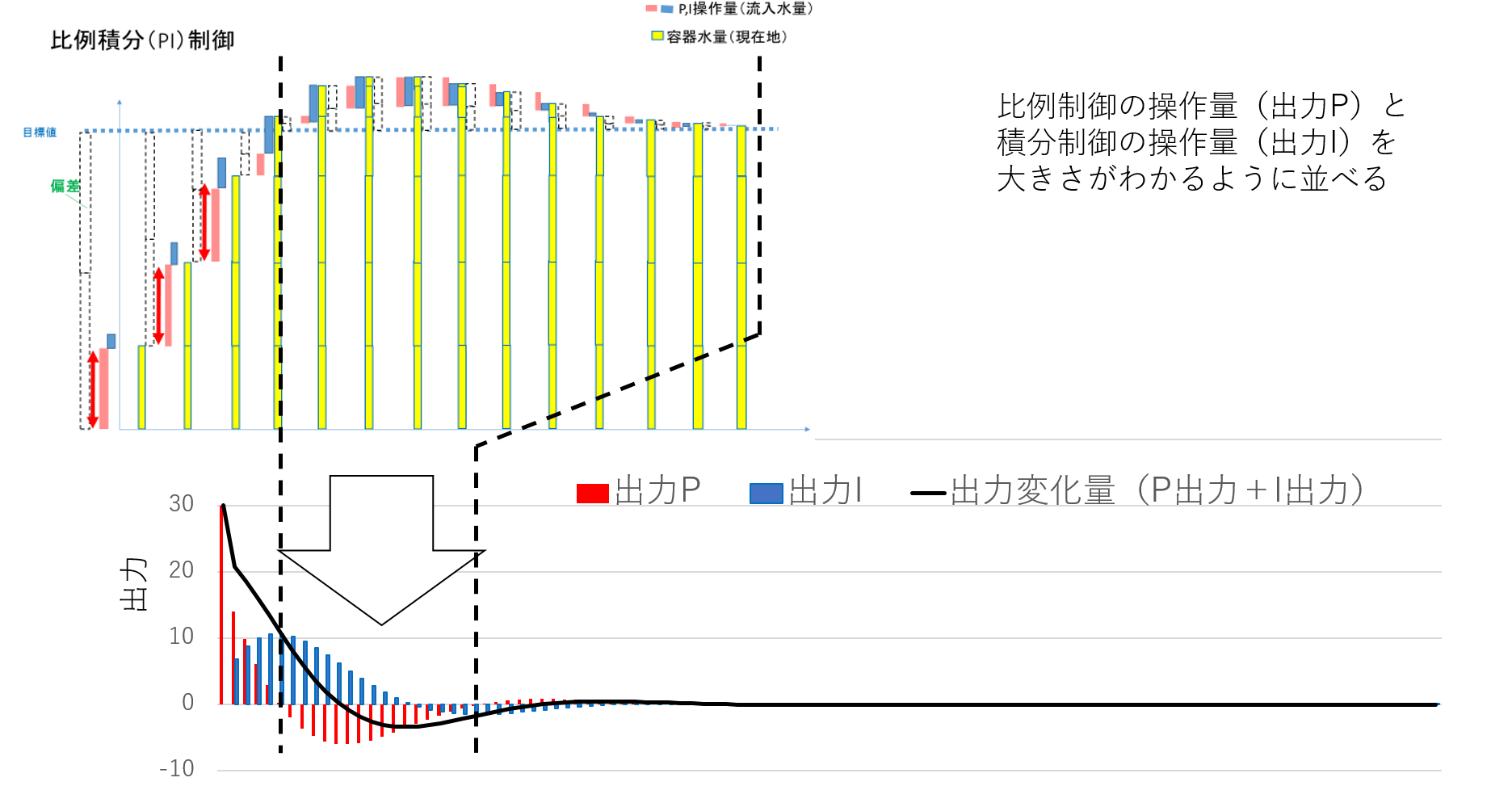
比例制御は「現在の偏差」に割合の定数(比例ゲイン)を掛けて算出
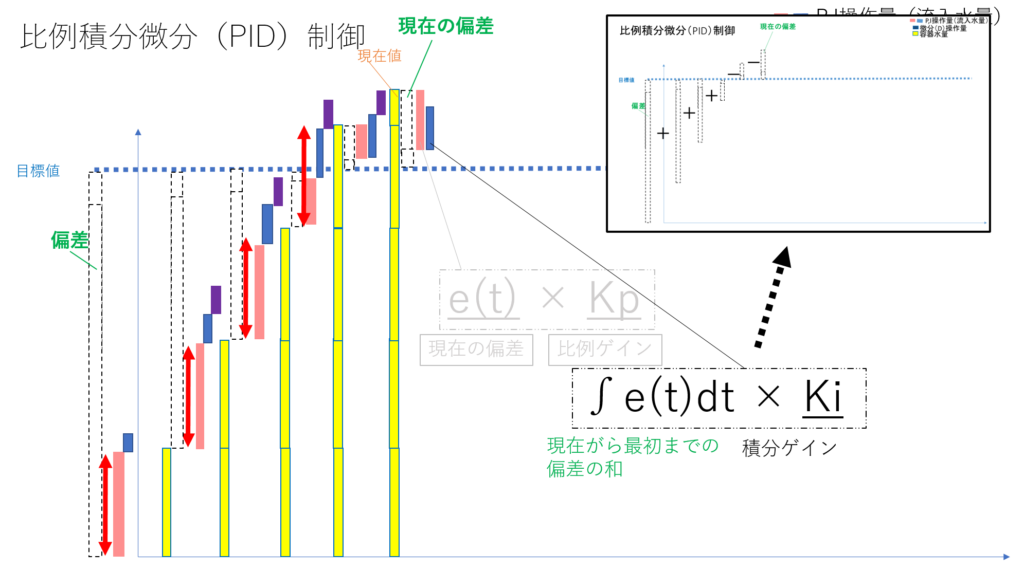
積分制御は「過去から現在までの偏差の合計」に割合の定数(積分ゲイン)を掛けて算出
微分制御は「前回の偏差」と「今回の偏差」の差に割合の定数(微分ゲイン)をかけて算出
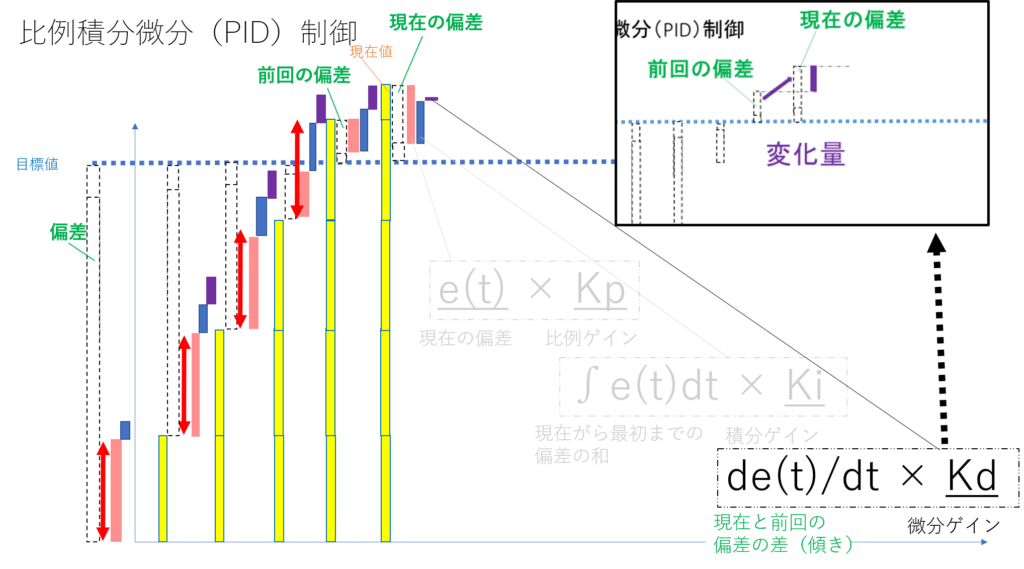

これらを足し合わせて以下のように操作量を合計して調整します。
実はこの計算工程が電子機器で制御システムを構築するとき有利となります。電子機器で演算処理を行う上で、計算負荷を下げるために最も大切なことが、データの蓄積量(メモリ使用量)を可能な限り減らすことなのです。
PID制御の計算式をシステムの演算で行ったとき、
①比例制御は、「現在の偏差」のみ使用するため、蓄積データは無し
②積分制御は、「過去から現在までの偏差の合計」を使用するため、蓄積データは「合計値」の1つ
③微分制御は、「前回の偏差」と「今回の偏差」の差を使用するため、蓄積データは「前回の偏差」の1つ
つまり、たった2つのデータ蓄積で済むのです。これが、PID制御が電子機器を使用するうえで優れている点です。
PID-1.gif)
参考にした本 基礎 制御工学

コメント