今回から5回に分けてPID制御について説明を紹介します。PID制御は、あらゆる産業機器でよく使用されるものの、その仕組みは非常に奥深く、制御対象と操作ロジックとの関係性の本質を理解し、パラメータを正しく扱える技術者は、非常に限られ、貴重とされています。ここでは数式を扱わず、操作量が制御対象へ影響を与えるまでのプロセスに着目し、可能な限りのイメージ図を用いて、制御の本質的な特性を説明します。
今回は基本的なP(比例)制御について
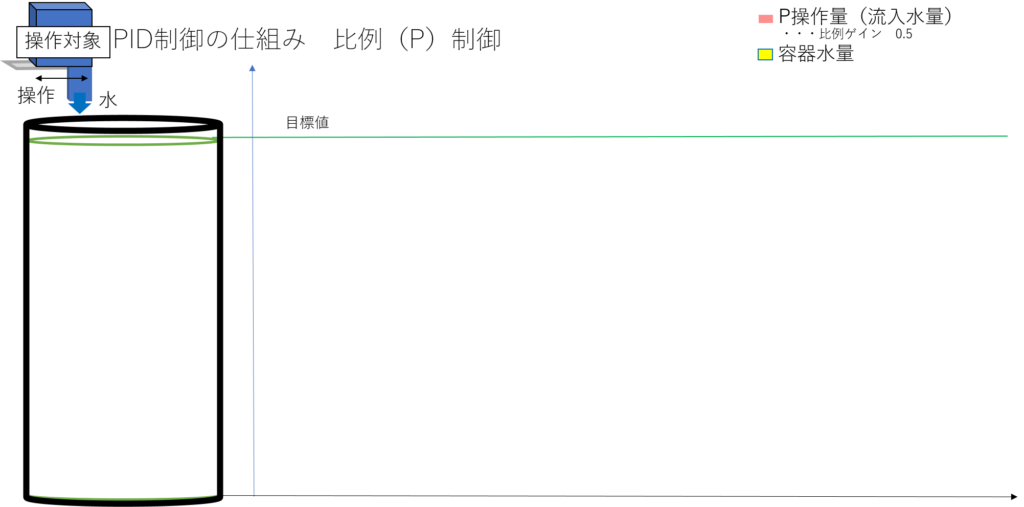
以下のように円柱型の容器に、スライド型のノズルを操作して水の流入量を調整しながら目標値の水位まで水を注ぐ場合を考えます。
前提条件として、操作対象のノズルには1秒に1回水位を読み込み、スライド移動の指示を送れる性能のシステムだとします。
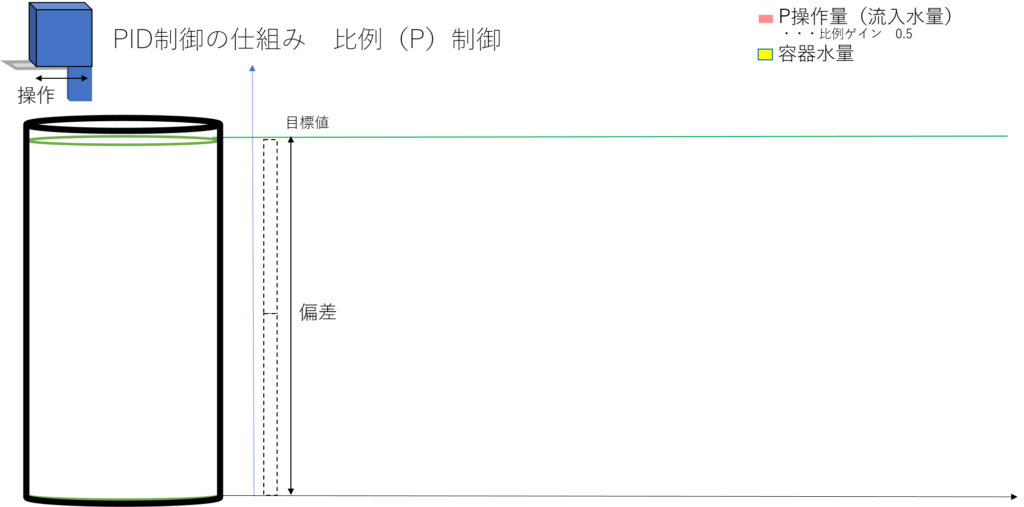
PID制御の演算の流れ
現在値と目標値までの水位差のこと(偏差)と呼び、この場合、初期は水位0~目標値までの水位差になります。PID制御では、この偏差を指標として操作対象(ノズルのスライド幅)を調整します。
たいていの場合、偏差(水位m)と操作対象(スライド幅:流量㎥/s)の物理量が異なるため、
偏差の初期値(水位差)=操作対象の最大レンジ(ノズルのスライド最大幅)
のように、そのままレンジを同一範囲に一致させることはしません。その理由は、以降のP制御の仕組みの説明で記載します。今回の場合は、
偏差の初期値(水位差)×0.3=操作対象の最大レンジ(ノズルのスライド最大幅)
と人が設定したとして考えます。
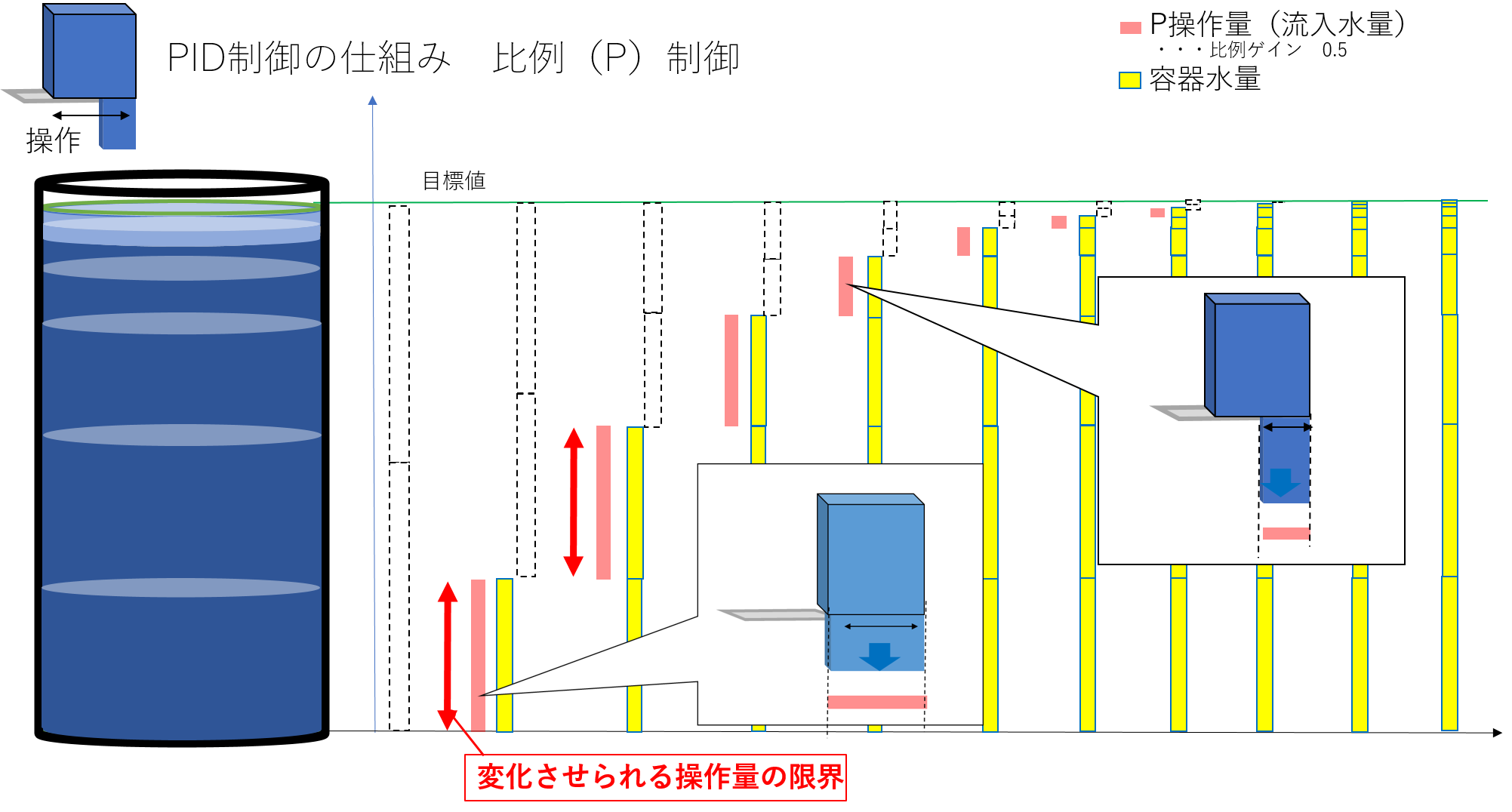
P制御の仕組み
P制御は、システムの演算タイミング(今回は1秒に1回)ごとに、システムで読み込んだ偏差に対し、人が設定する係数である比例ゲイン(今回は0.5)をかけ合わせた量をノズルの開度の調整幅として指示(P操作量指示)を送ります。
この場合は、偏差×0.5の幅=ノズルのスライド幅 となるように指示を送ることになります。しかし、ノズルのスライド幅に限界があるため、最大開度となります。
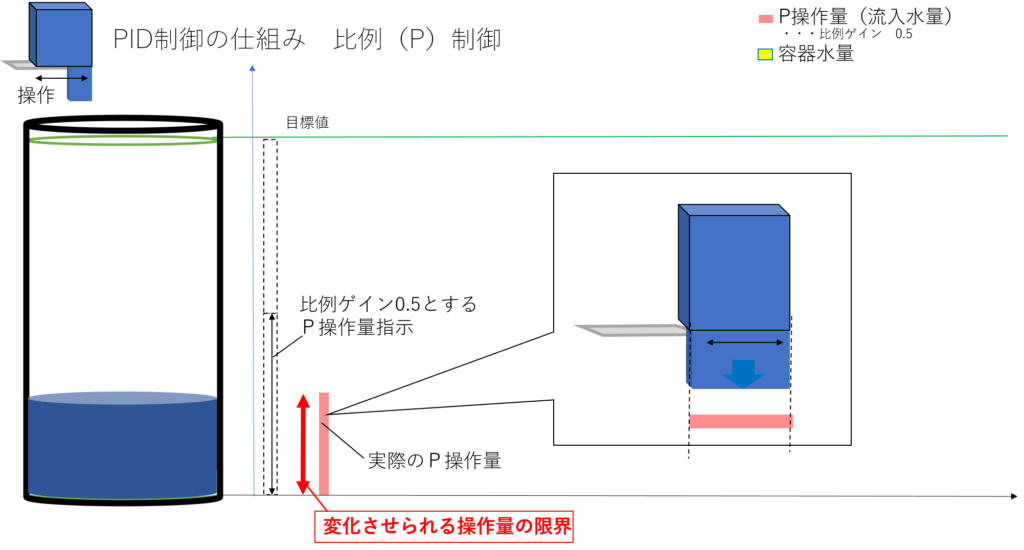
この時、システム内の判別式は、以下のように判断しノズルのスライドを最大開度としています。
偏差×0.5の幅>偏差の初期値×0.3=操作対象の最大レンジ
もし、初期設定で、偏差の初期値=操作対象の最大レンジとしている場合、P操作量指示は、
偏差(水位差)×0.5の幅=操作対象の最大レンジ×0.5
となるため、操作量が小さくなり、目標値到達までの時間が長くなってしまいます。これが、偏差の初期値=操作対象の最大レンジとしない理由です。
システムの演算タイミング(今回は1秒に1回)がまた来ると、たまっている容器水量を測定し、再び、偏差を演算、P操作量指示を送ります。P制御は、このサイクルが繰り返される形となります。
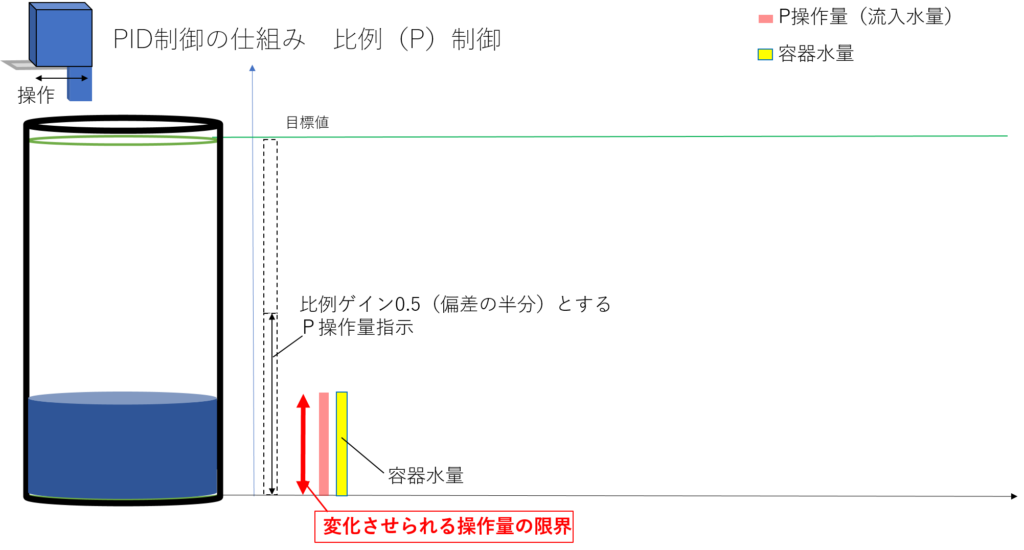
システムの演算タイミング(今回は1秒に1回)ごとに指令を繰り返しているうちに、
偏差×0.5の幅<偏差の初期値×0.3=操作対象の最大レンジ となり、
以下のように、偏差×0.5の幅=操作対象のレンジ と、P操作量が徐々に減っていきます。このように目標値へ向けて滑らかに操作量が調整されるのがP制御の特徴です。
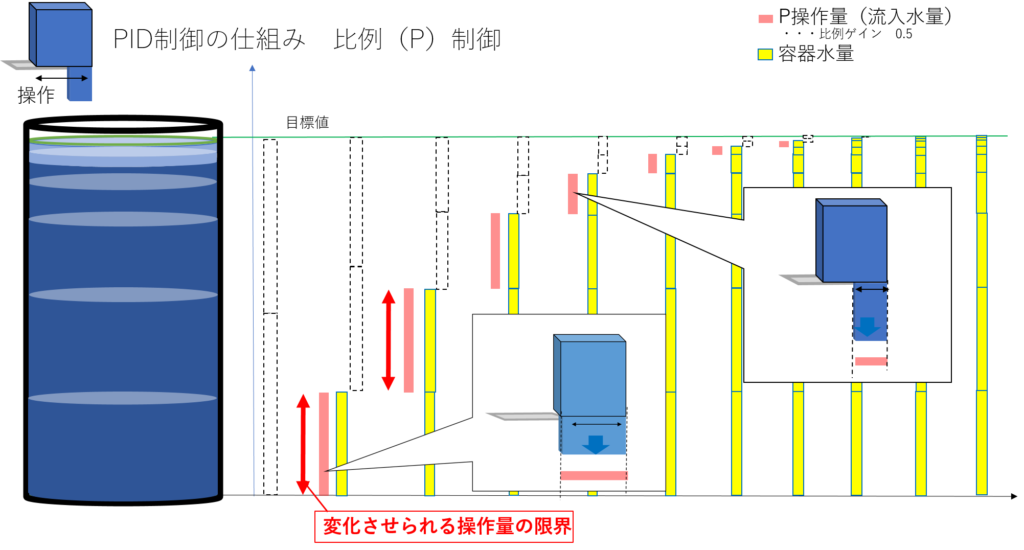
P制御による一連の変化を以下にアニメーションで示します。
参考にした本 基礎 制御工学
コメント