前回のI制御に続いて、D(微分)制御の役割と特性について紹介します。この説明をご覧になる場合は、PID制御の仕組み1回目(P制御)から順にご覧になることをお勧めします。
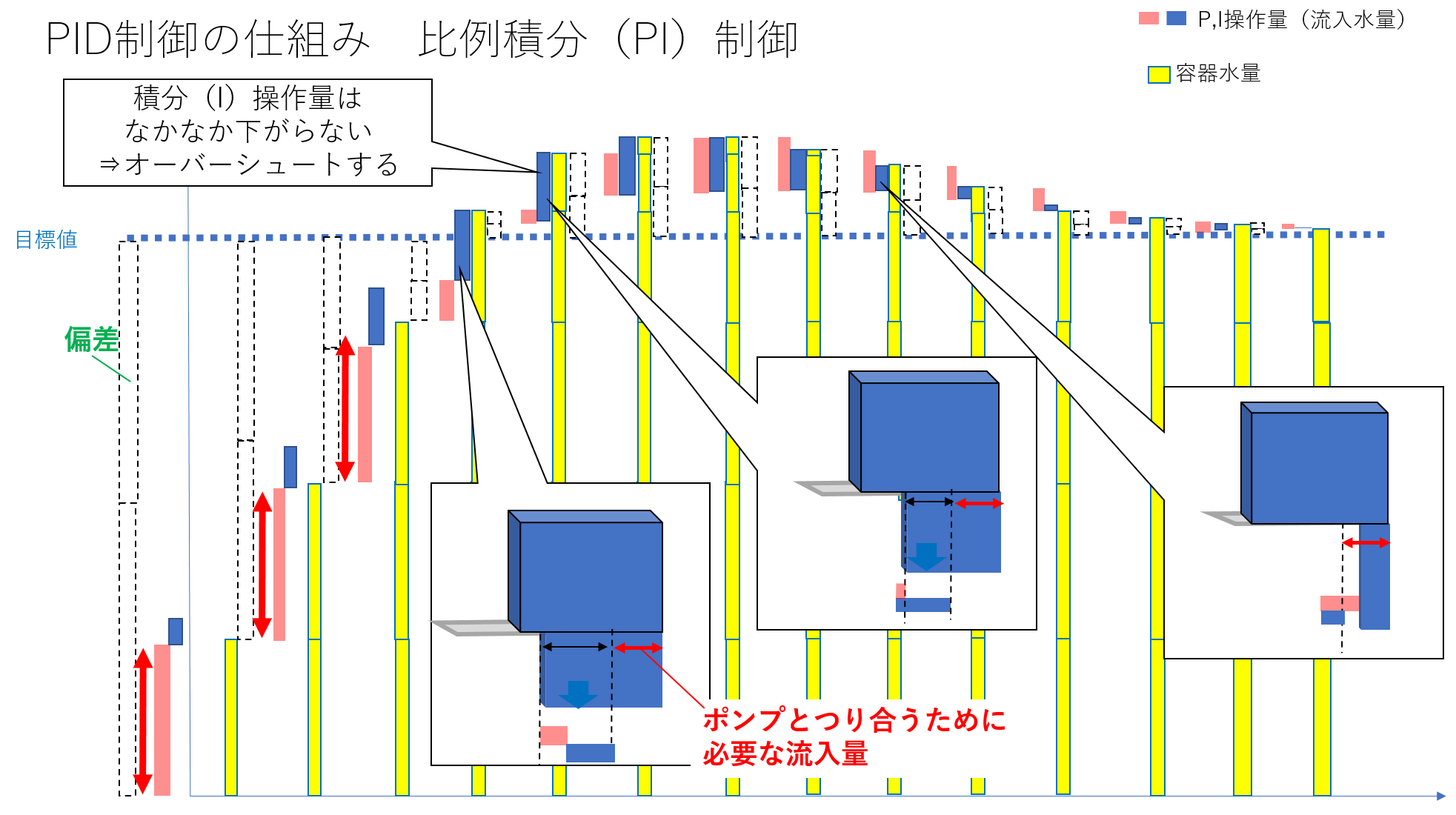
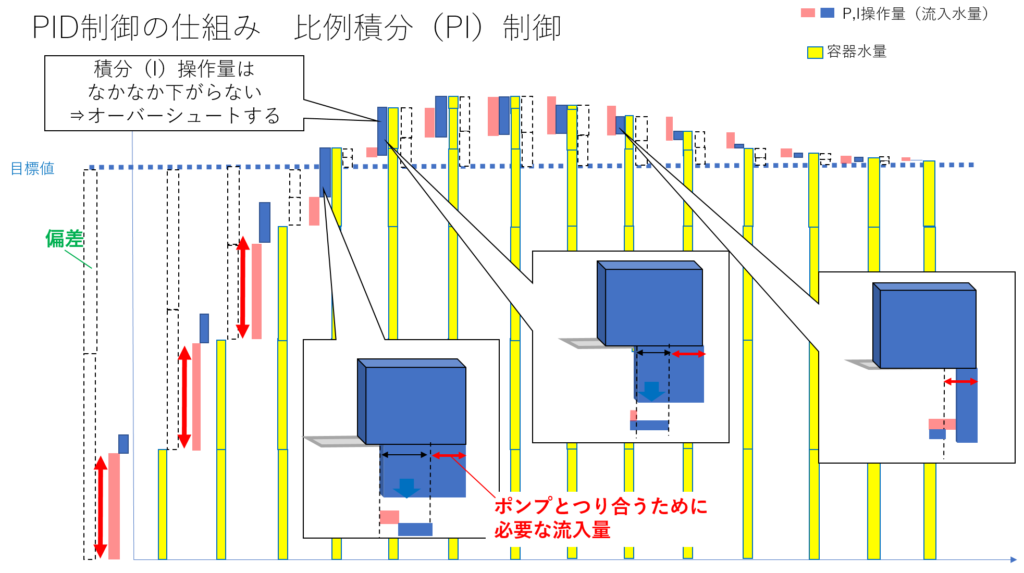
PI制御では、一定のオフセットに対し、一定の積分操作量(I操作量)を目標値到達後も出力し続けることで、二つの値が一致し、目標値を維持し続けることができることを伝えました。

微分制御(D制御)は、目標値から現在値が外れたとき、迅速に目標値へ戻ることを目的としています。
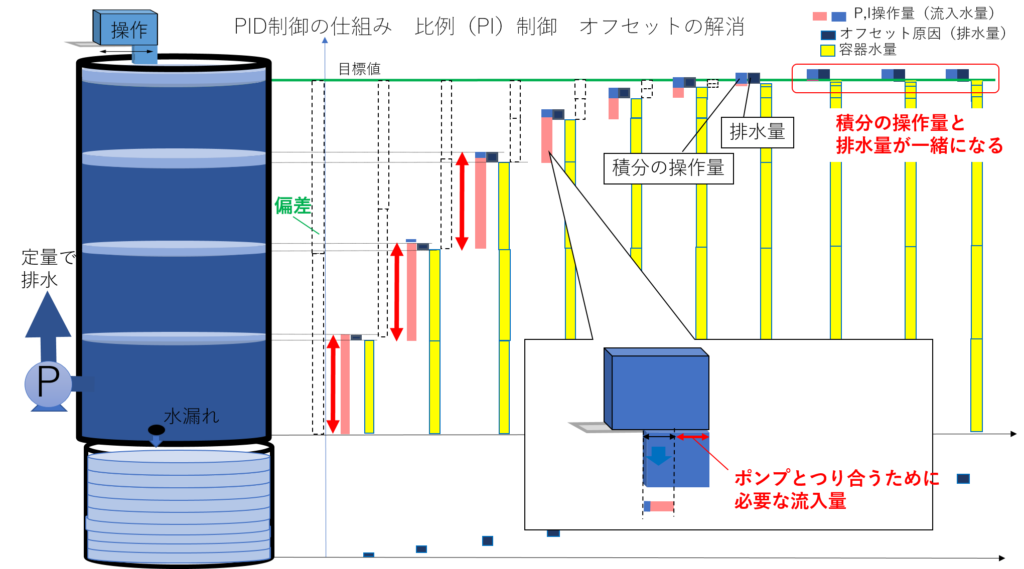
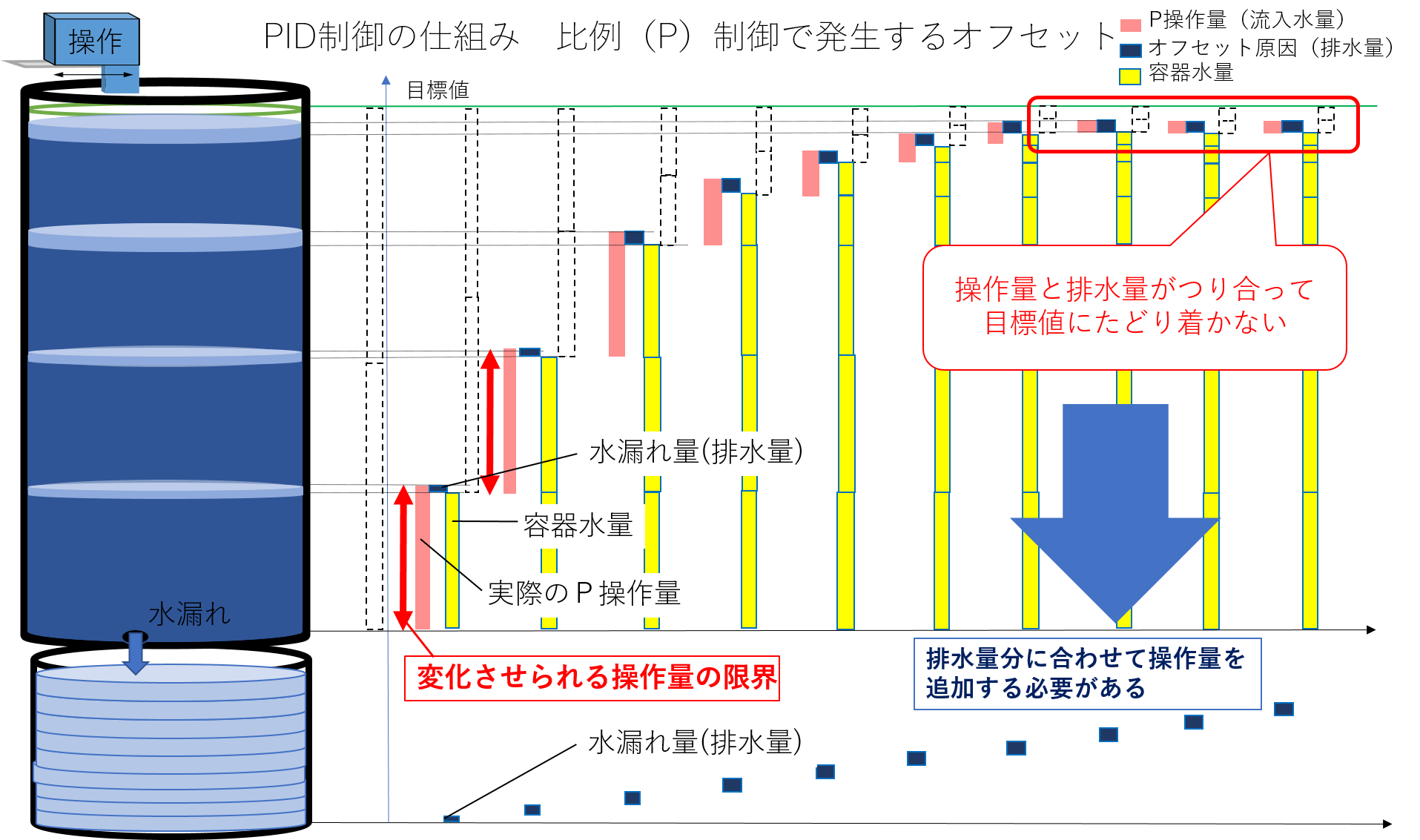
以下のように、定量でポンプによる排水を行いながら、目標値に到達する送水の制御を行っていたとしましょう。
この状態(比例ゲイン・積分ゲインを変えない状態)で、オフセットの要因である水漏れが塞がったときに、この容器を空の状態から目標値まで水を満たすことを考えます。
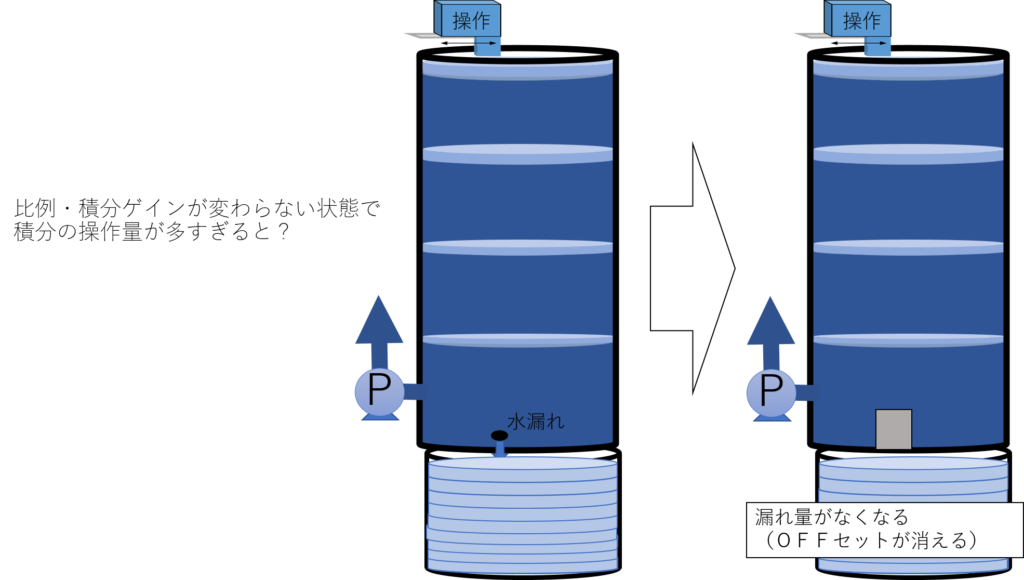
すると、積分操作量(I操作量)がなくなるまでに多くの時間が必要となり、目標値に水位が到達するには時間がかかってしまいます。
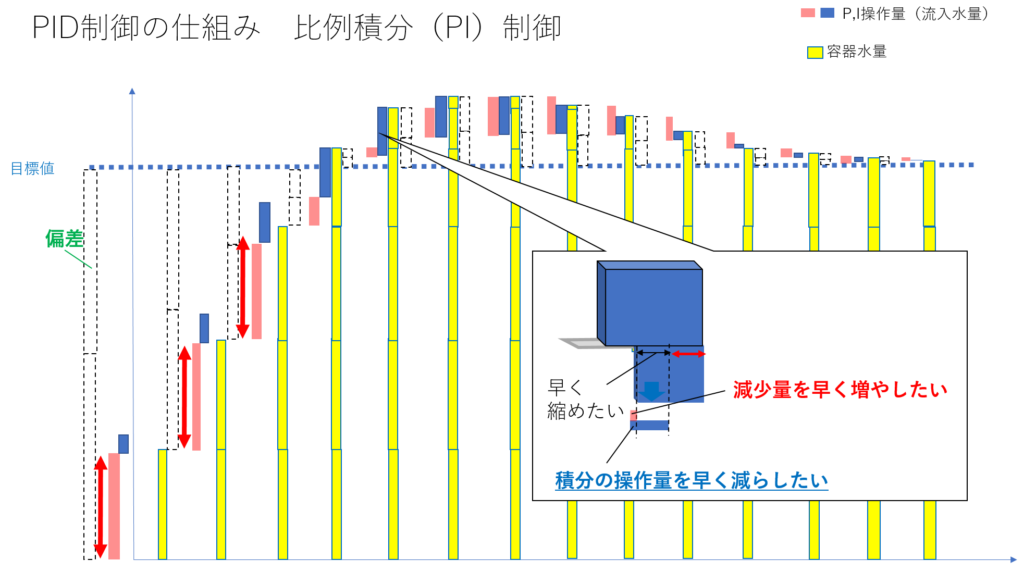
目標値に水位が到達するまでの時間を短くするためには、操作量を早く減らすため、目標値を超えた後
①比例操作量(P操作量)による減少量を早く増やす。
②積分操作量を早く減らす。
これらが必要となります。①の場合は比例ゲインを増やせばよいことがわかりますが、②の場合は、どのようにすればよいでしょうか?
積分操作量は、偏差の積分が0になったとき0となります。つまり、以下のように目標値を超えた偏差の和と、目標値を超える前の偏差の和が同じになったとき、操作量が0となります。
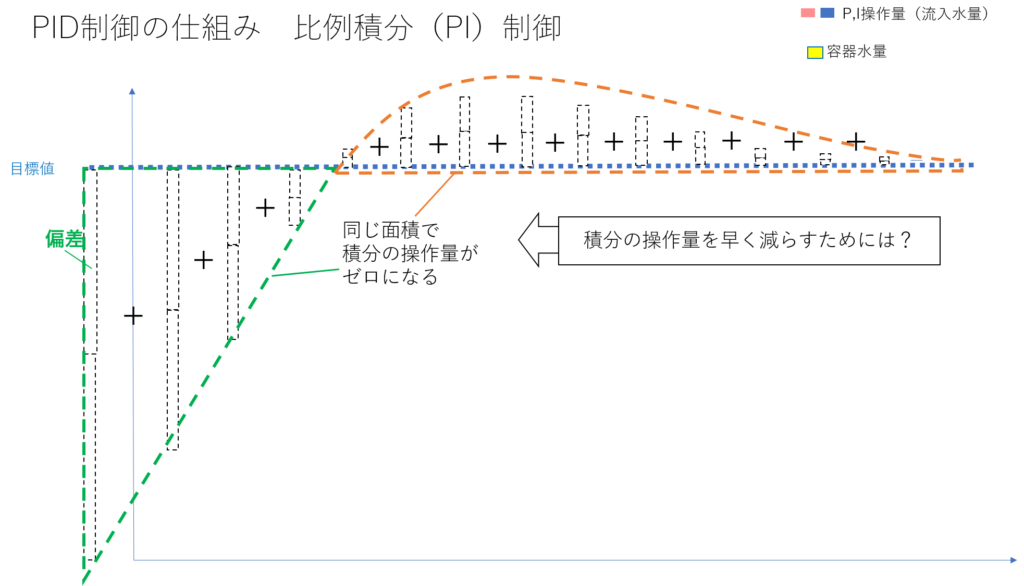
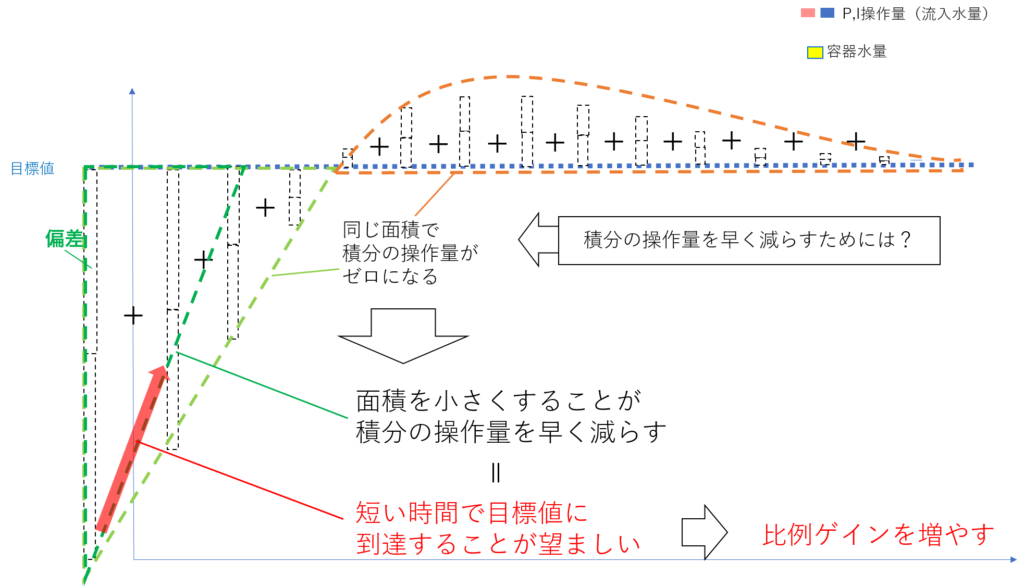
目標値を超える前の偏差の和が小さくなれば、積分操作量も早く0に近づけられます。したがって、こちらも、比例ゲインを増やせばよいことになります。
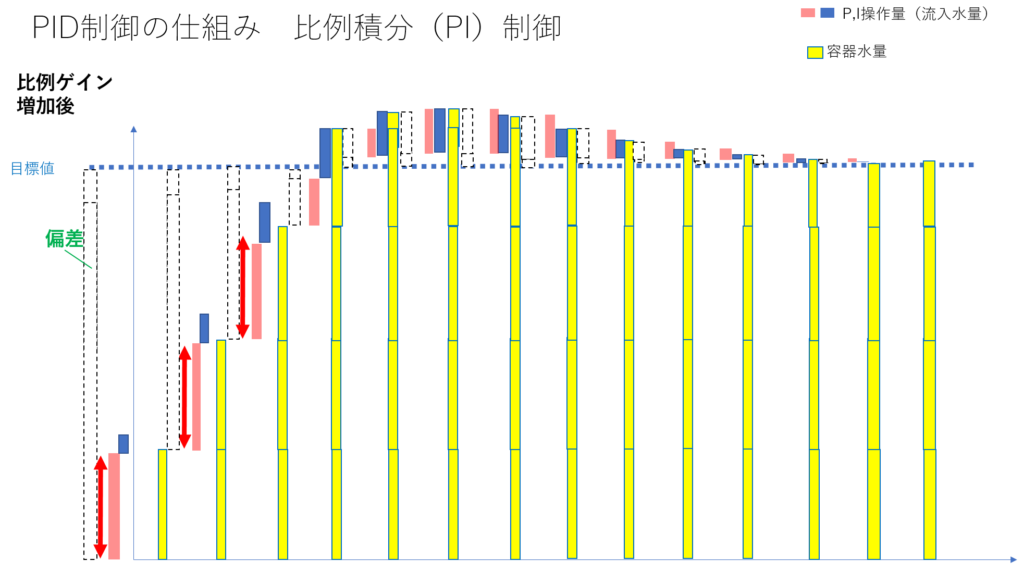
では、比例ゲインを以下のように増やすと、どの程度効果があるでしょう
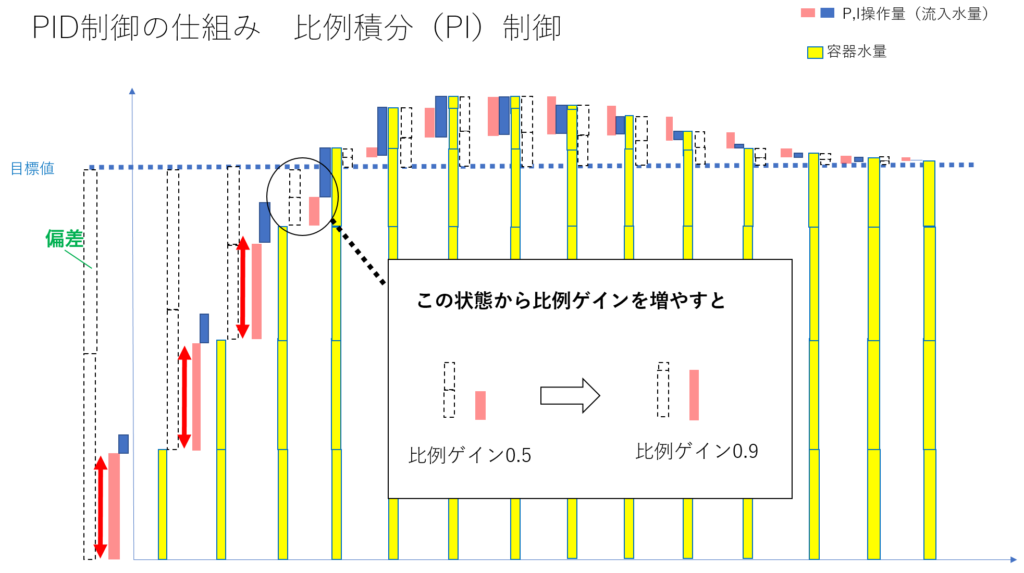
目標値を超えた範囲(オーバーシュート)の位置が手前にずれた分だけ少し、目標値到達が早くなります。
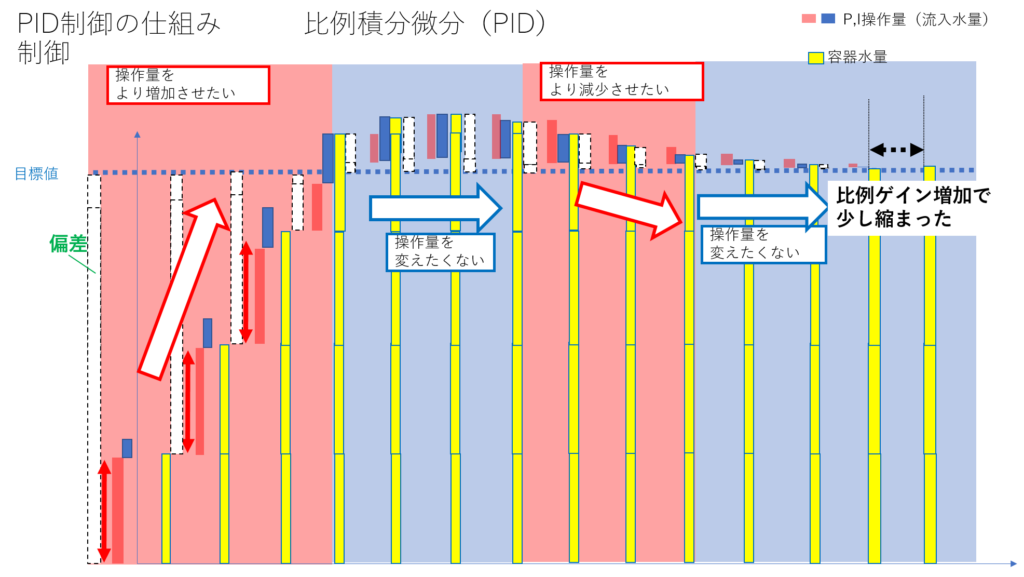
微分操作量(D操作量)は、この目標値への到達速度をさらに早めるために使用します。目標到達の速度を速めるためには、理想的には以下のように、①素早く目標値に増加し、②オーバージュート最高点をキープし、③目標値へ急減、④目標到達することが理想です。

以下のように、赤色の範囲と青色の範囲で操作量の範囲を分けたとき、赤色の範囲では操作量が急増減を、青色の範囲では操作量が緩やかとなる、操作量の変化となれば、目標値への到達はより一層早まります。
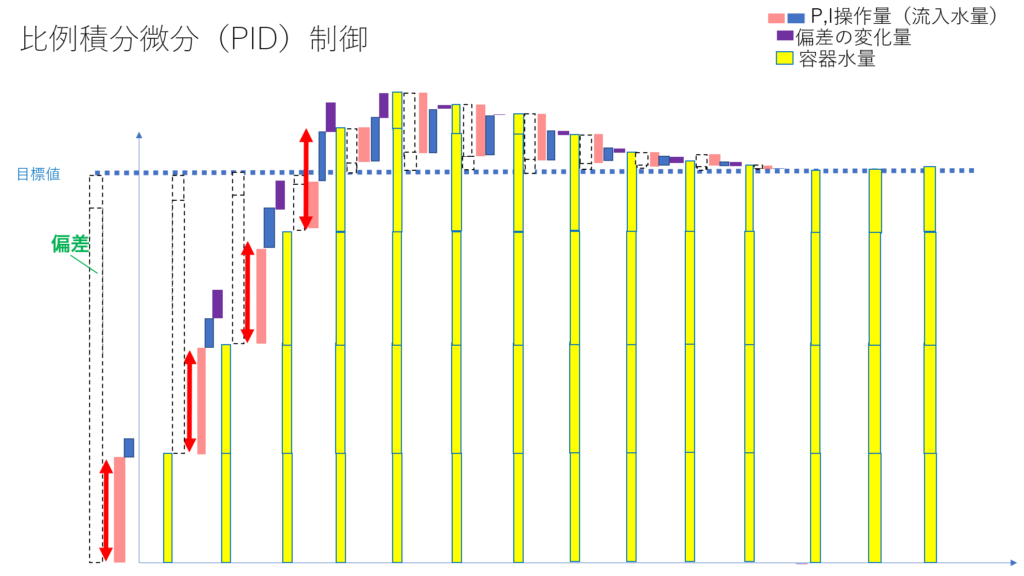
そこで、操作量の変動に、より緩急を加えるために追加する操作量の要素として、前後の偏差の変化量に着目しました。
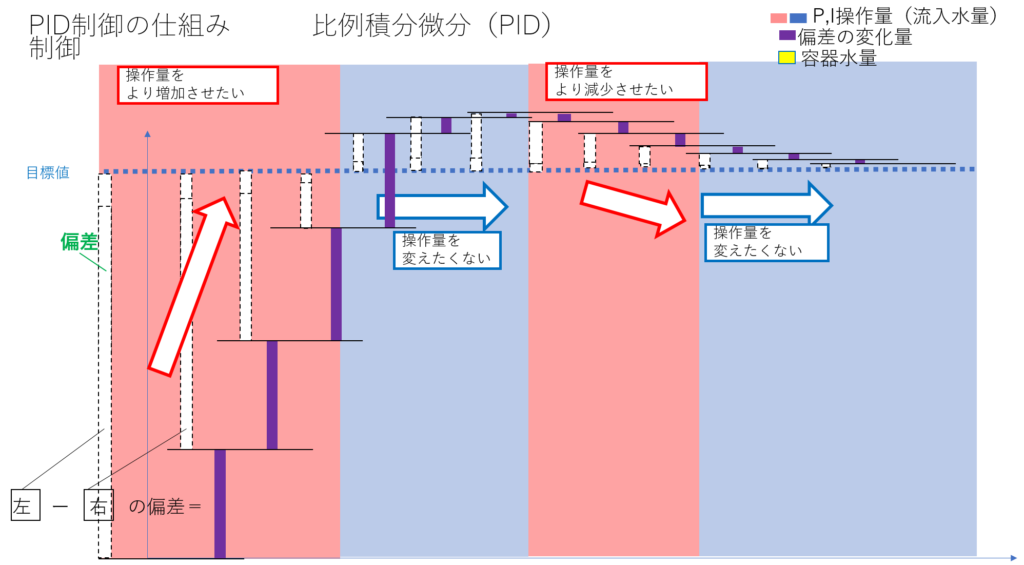
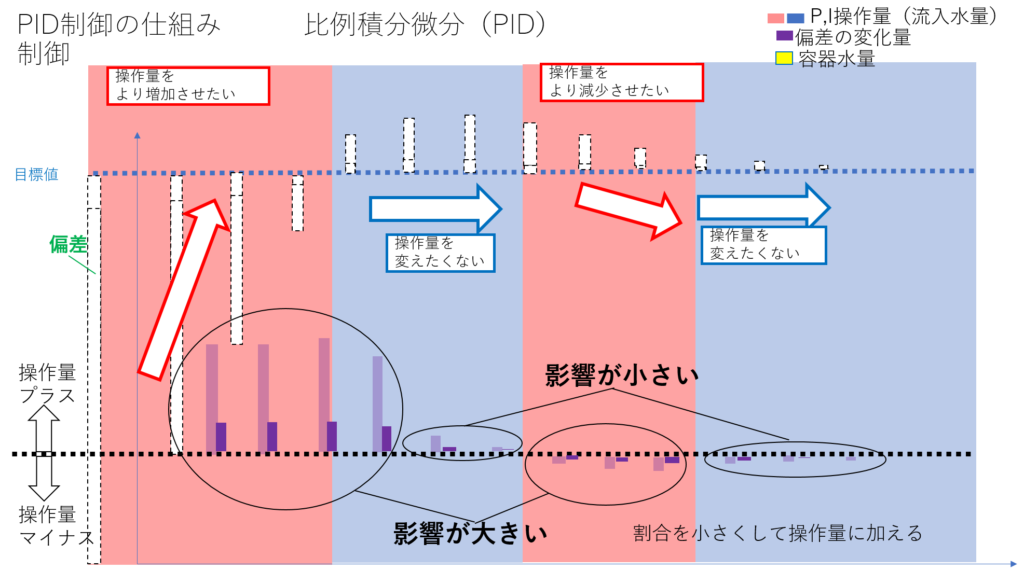
以下のように偏差の変化量を、増加+と減少-に分けで一列に並べたとき、操作量を増加・減少させたい赤色の範囲ほど、増加・減少の大きい偏差の変化量が分布します。

この特性を利用し、この偏差の変化量に定数の割合(微分ゲイン)を掛けて操作量として加えることで、目標値への到達速度をさらに早める。これが微分制御(D制御)です。
微分制御を加えたPID制御の変化を以下に示します。
PID制御にすることで、PI制御よりも目標到達までの時間が短くなります。以下にその比較を示します。

参考にした本 基礎 制御工学
![]()

コメント