今回は、これまでの内容とは少し異なり、制御工学の学習をする方向けに、制御工学の観点におけるPID制御の考え方を紹介します。
PID制御についてネットや書籍で仕組みを理解しようとした方は、「I制御は位相を遅らせる性質がある」という言葉を目にしたことがあるかもしれません。その意味について紹介します。
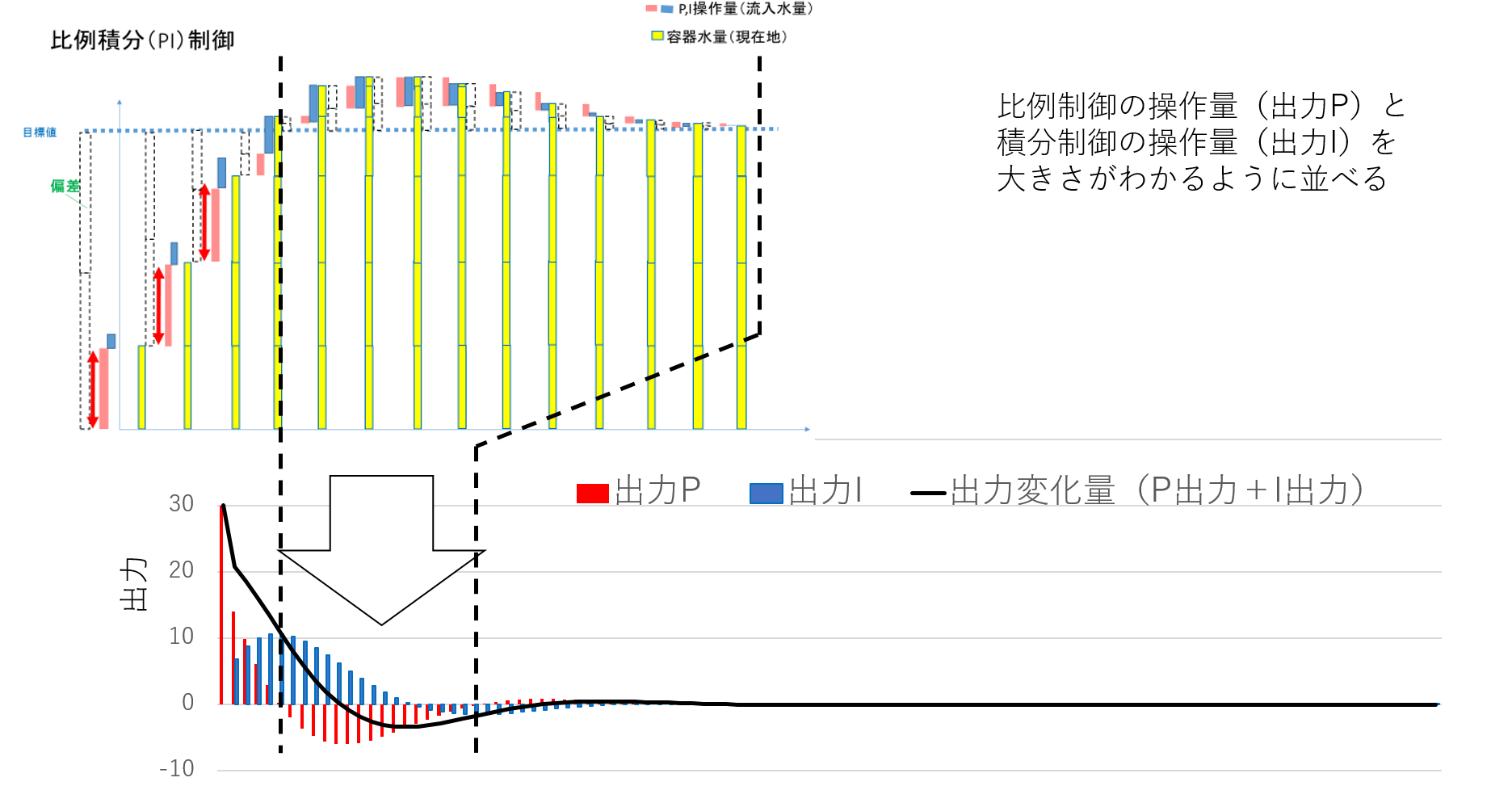
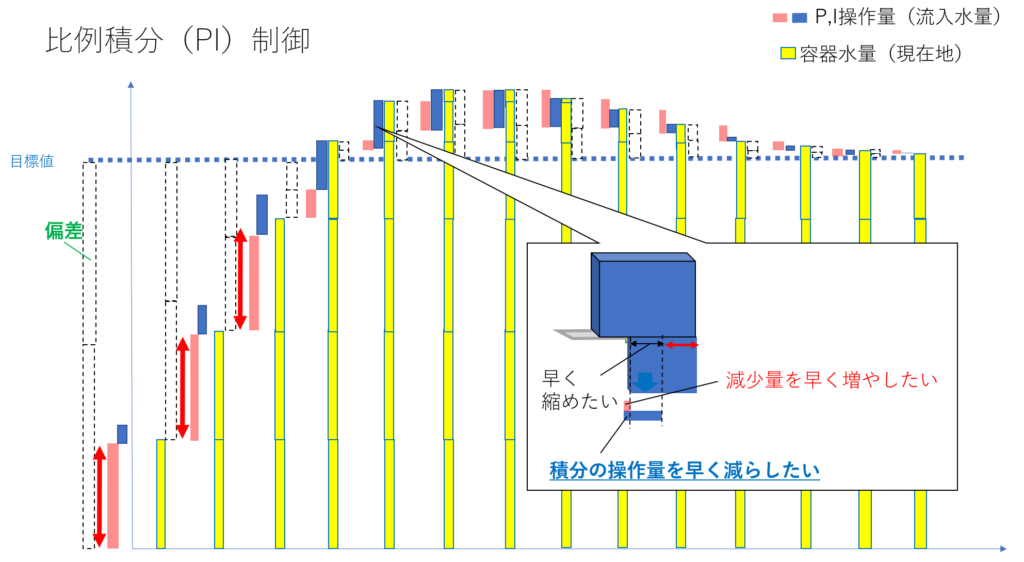
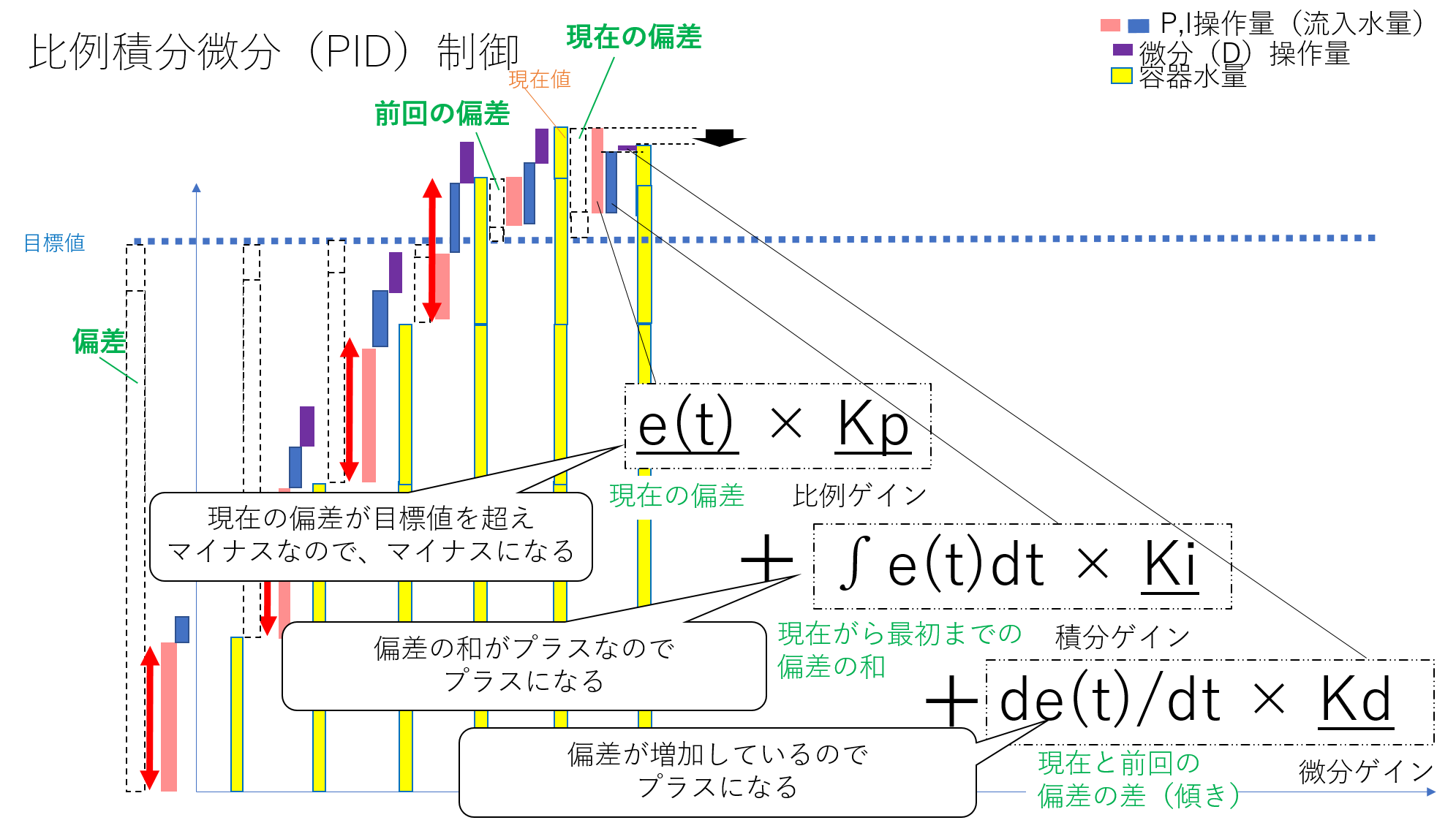
「PID制御の仕組み 3回目」で説明した以下のようなPI制御の操作量変化で目標値に早く近づけるためには、「積分操作量を早く減らしたい」という記載があったと思います。

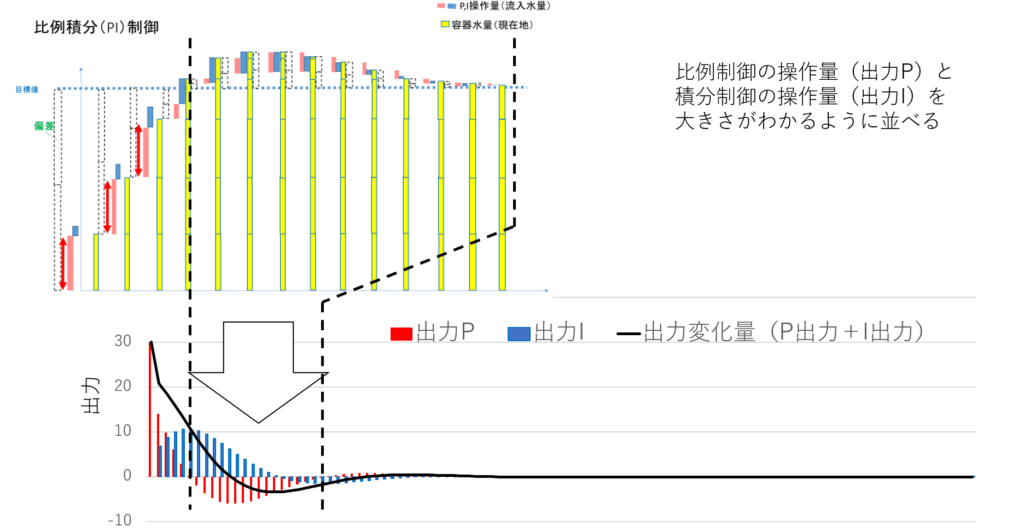
この時のPI制御の操作量変化の推移をそれぞれ操作量出力を軸に並べてみましょう
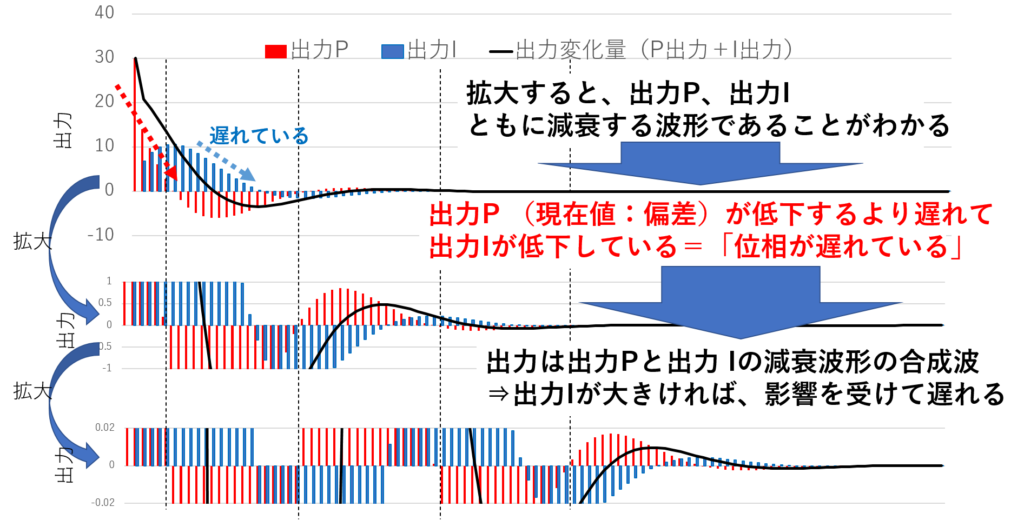
この出力幅をどんどん拡大してみます。
すると、P制御、I制御の出力はともに減衰する波形であることがわかります。そして、波形として捉えたとき、I制御の出力波形はP制御の出力波形よりずれていることがわかります。ここが制御工学の考え方です。
先ほどの「積分操作量を早く減らしたい」、つまり、「積分操作量の低下が遅い」という見方を、制御工学では、「積分操作量の位相が遅れている」というように波形の位相ずれとして捉えるのです。
PID制御は、制御工学においては以下ようにP、I、Dの操作量の「位相波形」を合成することで出力を調整していると考えます。この時、Dの位相はPより進んだ位相であり、Iは遅れた位相となります。
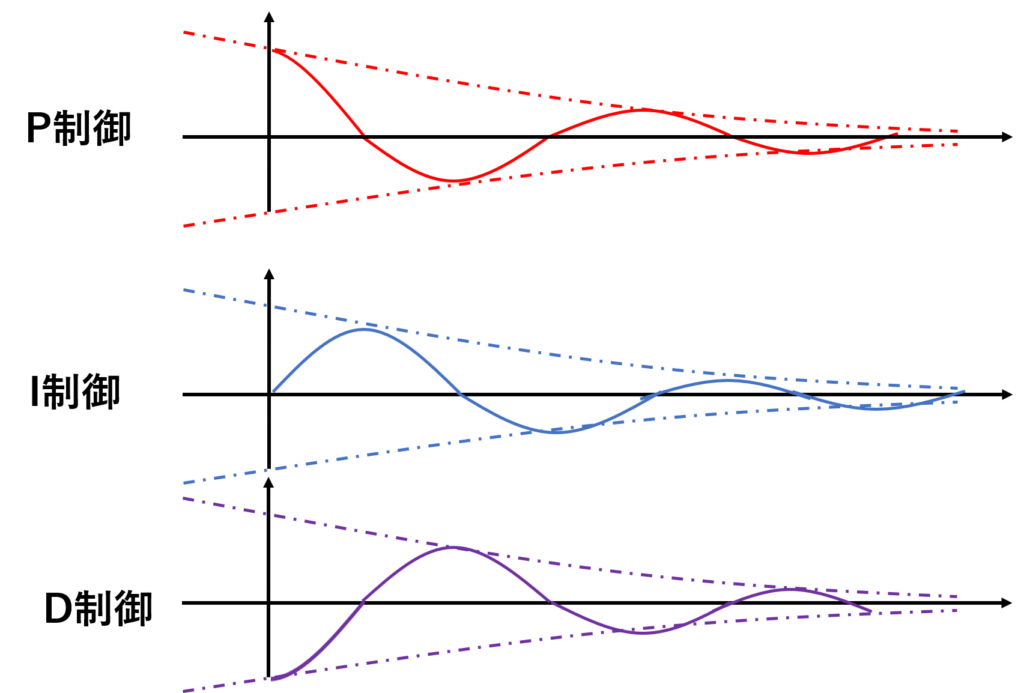
それぞれの波形は、これまでに紹介した定数(比例ゲイン、積分ゲイン、微分ゲイン)の大きさを変化させることで、波形の大きさが変化します。
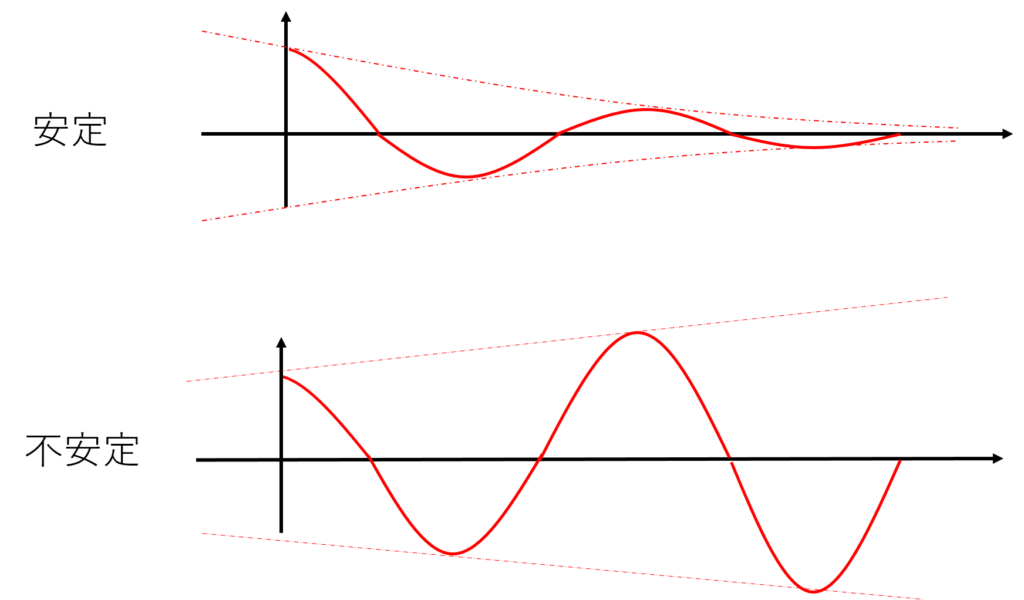
P、I、Dの3つの操作出力波形の合成波形が減衰してゆくとき、いづれ出力がゼロになることから、制御工学では、システムが「安定」していると表現しています。
ここまで説明した考え方から、制御工学は、ラプラス変換式の利用、ボード線図、ナイキスト線図の表現などへの応用的な考えへ繋がってゆきます。
参考にした本 電験二種 二次試験の完全研究
.gif)
コメント