誘導機では、電車やクレーンといった振動や環境の悪い場所では、制御部品構造が単純で頑丈な構造が求めらるとき、二次抵抗器を用いた制御が広く一般的に使用されています。ここでは、前回に続き、二次抵抗を誘導機に使用した比例推移による制御を「渦流ブレーキ」もしくは、「一次電圧制御」と組合わせた制御方法における制動(電車における減速、クレーンにおける巻下げ)の仕組みについて紹介します。
前回も紹介した通り、渦流ブレーキは、発電機をブレーキとして使用し、以下の図のようにモータ軸に直結させることで、回転数が上がるほど制動力がブレーキにかかる仕組みで、発電機の界磁電流にあたる直流電流の量を操作することで、制動トルクの大きさを調整し、回転数の微調整を行います。
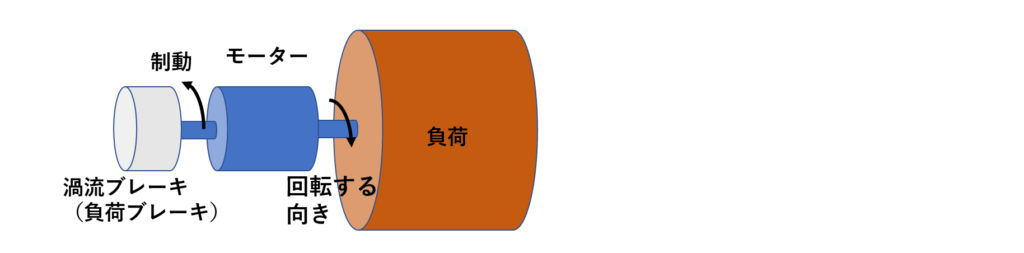
制動制御の場合、比例推移における二次抵抗を大きくすることで、トルク変動に対する滑り幅を大きくし、-方向の負荷トルク以上にプラス方向の制動トルクを渦流ブレーキで加えることで、制動時の速度を調整します。

この時、誘導機の回転する方向と回転磁束の回転方向は、一致します。

一方で、一次電圧制御は、誘導機の電源電圧V1を低下させることで、回転子で発生する電流I2を低下させてトルクを低下させ、滑りを1以上に大きくすること制動方向の制御を行います。
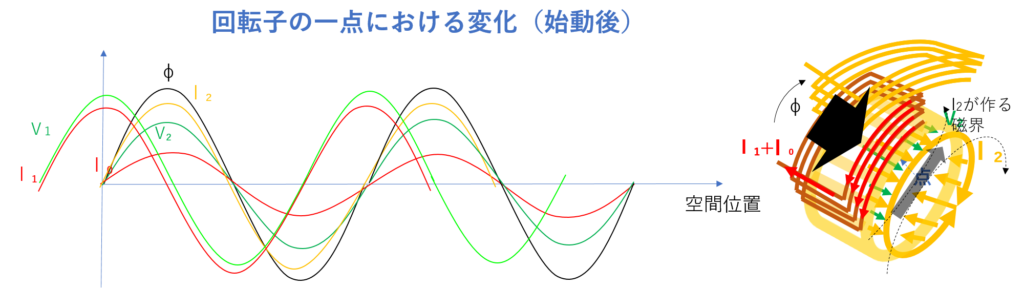
したがって、以下のように誘導機の回転方向と回転磁束の回転方向が逆となります。

この時、速度に応じたトルクカーブの変化は以下のようになります。

コメント