誘導機には、特性として始動時に十分なトルクを発生することができない問題があります。最近ではインバータによる回転制御が主流となっていますが、電車やクレーンといった振動や環境の悪い場所では、精密機器であるインバータを設置することが好まれないケースもあります。そのような制御部品構造が単純で頑丈な構造が求めらるとき、二次抵抗器を用いた制御が広く一般的に使用されています。
ここでは二次抵抗を誘導機に使用した比例推移による制御を「渦流ブレーキ」もしくは、「一次電圧制御」と組合わせた一般的な制御方法について紹介します。
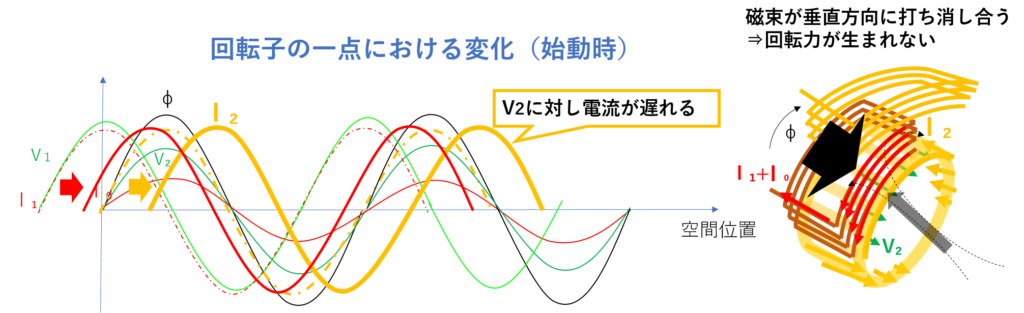
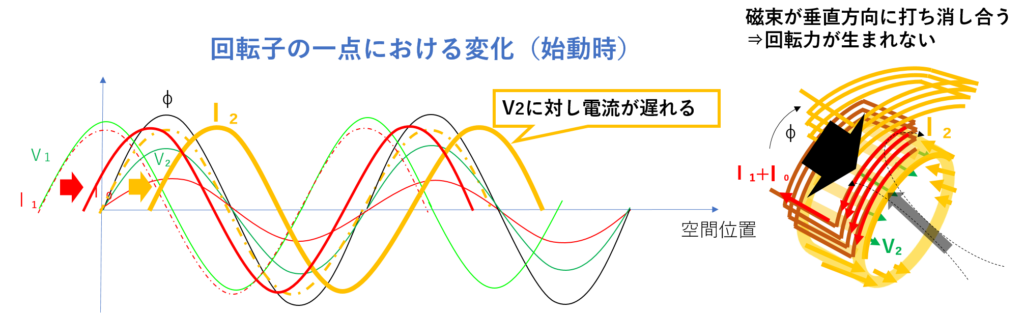
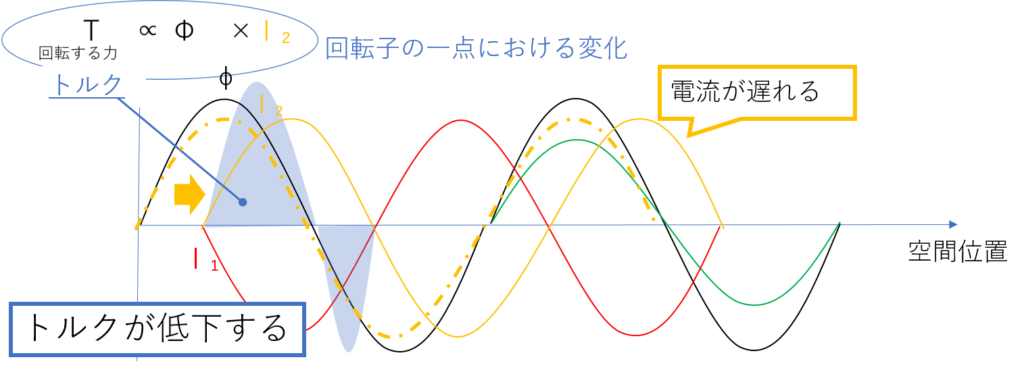
誘導機が始動時に十分なトルクを発生させられない理由は、以下のように、始動後では、回転子で発生する電圧V2と電流I2が同じ位相であるのに対し、始動時は、回転子表面の磁束の変化が速すぎるため、I2の位相がV2に対し1/4周期近く遅れた位相となってしまうことが原因です。
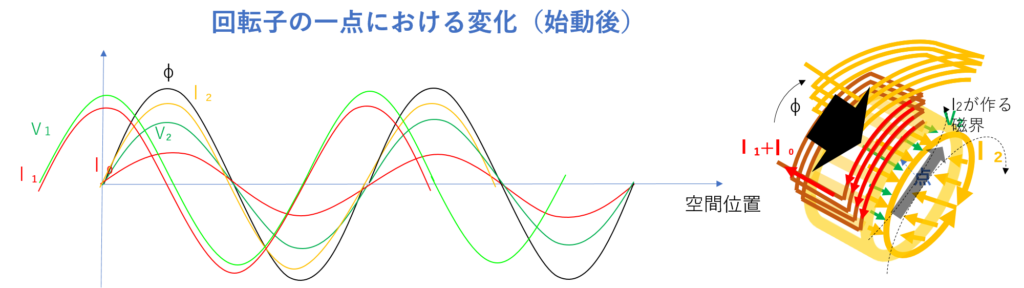
二次抵抗制御は、I2の位相がV2に対し遅れてしまう理由が、回転子のリアクトル的ふるまいによるものであるため、回転子の抵抗を上げることで、I2位相を始動後の状態に近づけようというものです。
二次抵抗制御は、以下のように誘導機の等価回路の回転子側(右側)の回路に抵抗をいくつもつなぎ、回転速度が上昇するにしたがって、抵抗を徐々に外していくことで、トルクを落とすことなく回転速度を目標値まで上げてゆきます。この仕組みを「比例推移」と呼びます。
しかし、この比例推移を利用した二次抵抗制御では、抵抗を投入していく過程で、均等な間隔で速度を制御できないことや、負荷の変動によって大きく速度が変わってしまう問題があります。この問題を解決するために、「渦流ブレーキ」もしくは、「一次電圧制御」が併用して使用されています。
渦流ブレーキは、発電機をブレーキとして使用し、以下の図のようにモータ軸に直結させることで、回転数が上がるほど制動力がブレーキにかかる仕組みです。
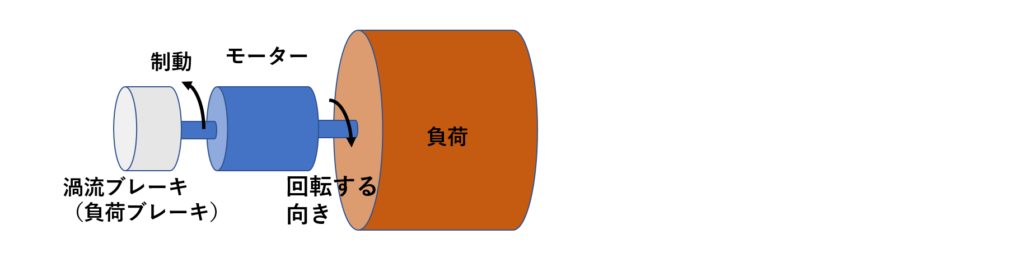
発電機の界磁電流にあたる直流電流の量を操作することで、制動トルクの大きさを調整し、回転数の微調整を行います。比例推移と組合わせると以下のように制御されます。

一次電圧制御は、誘導機の電源電圧V1を低下させることで、回転子で発生する電流I2を低下させてトルクを低下させ、回転数を調整する仕組みです。
比例推移と組合わせると以下のような制御の流れとなります。


コメント