
ここでは、二次抵抗制御やベクトル制御といった電気の位相を変えることでトルクを制御する原理を理解するために必要な、空間軸と時間軸で見た電気の物理現象のずれについて紹介します。
参考書には、「時間と空間に隔たりがあるため、ベクトル図と空間的な二次電流・磁束分布図は異なる」などのように説明が省略されてしまい、時間と空間の関係を説明している文献が非常に少ないため、理解に苦しんでいる方も多いのではないかと思います。
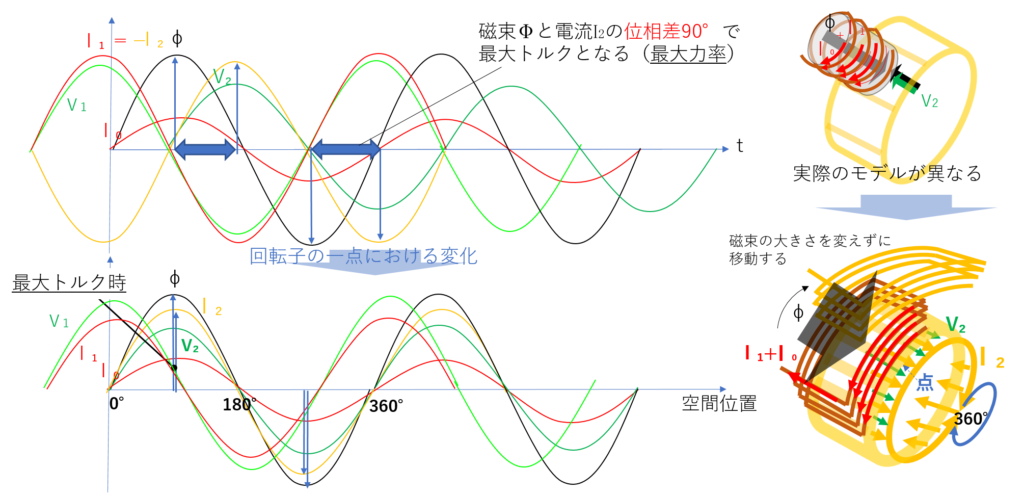
電力においては、力率1、つまり電流と電圧の位相がピッタリ重なるとき、最大の出力となります。この状況を前回2回目で説明しました以下の波形・ベクトル図で考えてみます。

力率1の状況とした場合、以下のような波形、ベクトル図になります。この時、出力が最大となり、最大トルクを発生させるはずです。しかし、波形では、固定子コイルで発生する磁束Φと反発力を生み出す二次電流I2は最も重なりにくい1/4周期(90°)の位相差となっています。

この疑問がわからない方は、「誘導機の原理 1回目(基礎)」と「誘導機の原理 2回目(物理現象のメカニズム)」の順に閲覧していただくことをお勧めします。(リンクを一番下に掲載します。)
この疑問を理解するためには、今まで扱ってきた物理モデルを、実際の誘導機のモデルに近づけて考える必要があります。

重なり合った固定子コイルで構成された誘導機の部分的な物理モデルを考えます。
一つの固定子コイルから発生する磁束が最大となる瞬間、回転子の一点(青矢印↑)において、この固定子コイルの磁束が減少するとき、隣り合う固定子コイルから新たに磁束が発生するため、合成磁界は大きさを変えることなく回転子の側面を横にスライドします。

回転子導体で磁束が通過するとき、以下のように回転子導体で磁束が打ち切られ続けます。
.png)
したがって、磁束が回転子導体の棒を横切るとき、青矢印↑の点における回転子導体内側の磁束分布は、以下のように↑の点が低くなった状態を維持して磁束が通りすぎてゆきます。

合成磁界が完全に回転子導体の棒を通過するまで、回転子導体の棒の右側では磁束が急減し、左側では磁束が急増します。この磁束の変化を打消す方向に、回転子導体で起電力が発生します。これが二次側起電力V2です。つまり、回転子導体に発生する二次側起電力は、その回転子導体にかかる磁束と同相になります。

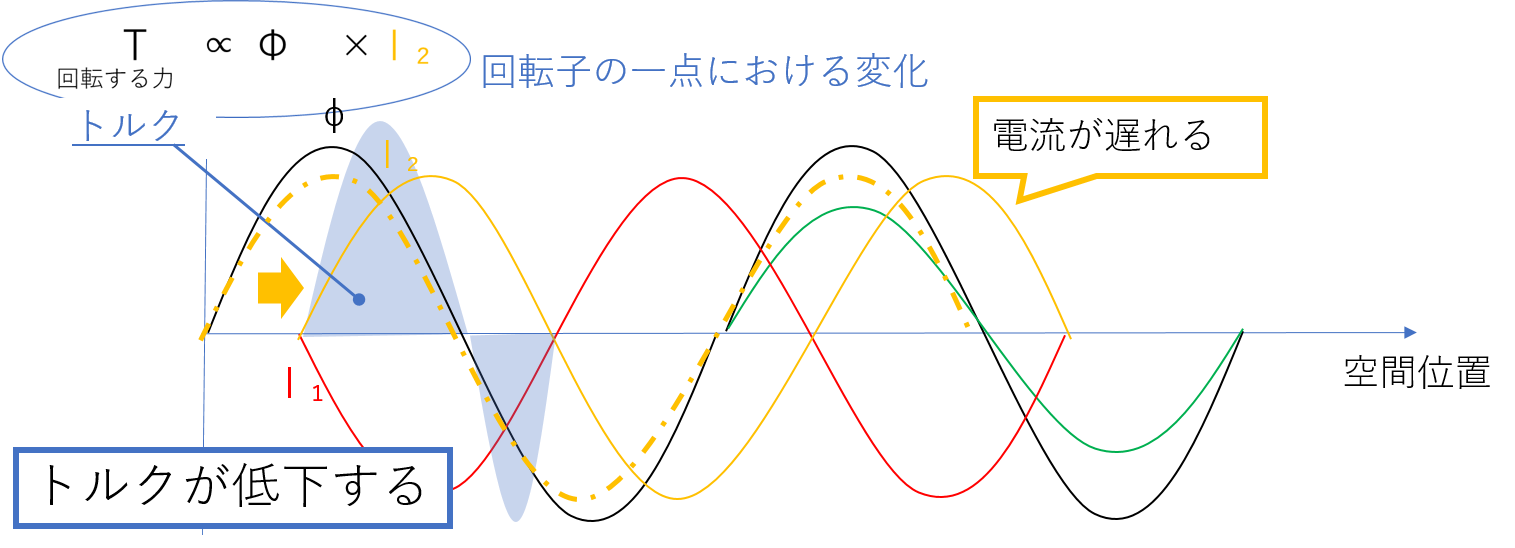
回転子導体内側の磁束変化の大きさは、その点を通過する合成磁界の大きさによるため、合成磁界Φと二次側起電力V2は比例した大きさとなります。以下が横軸を空間位置としたときの空間的分布で、これが時間的分布との違いになります。(一周期を360°の空間位置としています)

この時、一次側の波形も加えると以下のようになります。

誘導機に発生するトルクの大きさは、V2とI2、V1とI1いづれも同相となったとき、つまり力率が1の時、最大トルクとなることがわかります。

最大トルク時、電流・電圧・磁束の分布を物理モデルに当てはめてみると、二次電流I2の作る磁界と固定子の作る合成磁界Φは直角の状態であることがわかります。

以上のように、合成磁界で考えたときの空間的な物理現象の波形分布と、時間的な物理現象の波形分布では、二次電圧V2と電流I2の波形分布が、1/4周期(90°)の位相差の違いができることがわかります。

.gif)
参考にした書籍
誘導機・同期機器ともにかなり詳しい範囲まで記載されています [改訂版]徹底解説 電動機・発電機の理論
![]()
個人的にお勧めの書籍
数式が少なく、絵での解説が多いため、初心者にとって物理イメージから入りやすい本です。最新版 モータ技術のすべてがわかる本 (史上最強カラー図解)
コメント