
入力電流(一次電流)を励磁電流とトルク電流に成分を分けて制御するのがベクトル制御です。ここでは、誘導機内の物理現象で励磁電流とトルク電流がどのように発生しているかに着目することで、励磁電流は入力電圧、トルク電流は励磁電流、回転速度と回転位置から算出して制御できることを紹介します。
※説明の本質がより明確となるように、誘導機の漏れ磁束や巻線銅損の影響は、軽微なものとして無視して説明します。
励磁電流
励磁電流は、固定子巻線に回転磁束を発生させるために流れる電流です。固定子巻線はリアクタンスですから、一次電圧に対し90°(1/4周期)遅れた位相となり、以下のような式で電流が流れます。固定子巻線のリアクタンスは変動しませんから、一次電圧によって算出が可能です。

トルク電流
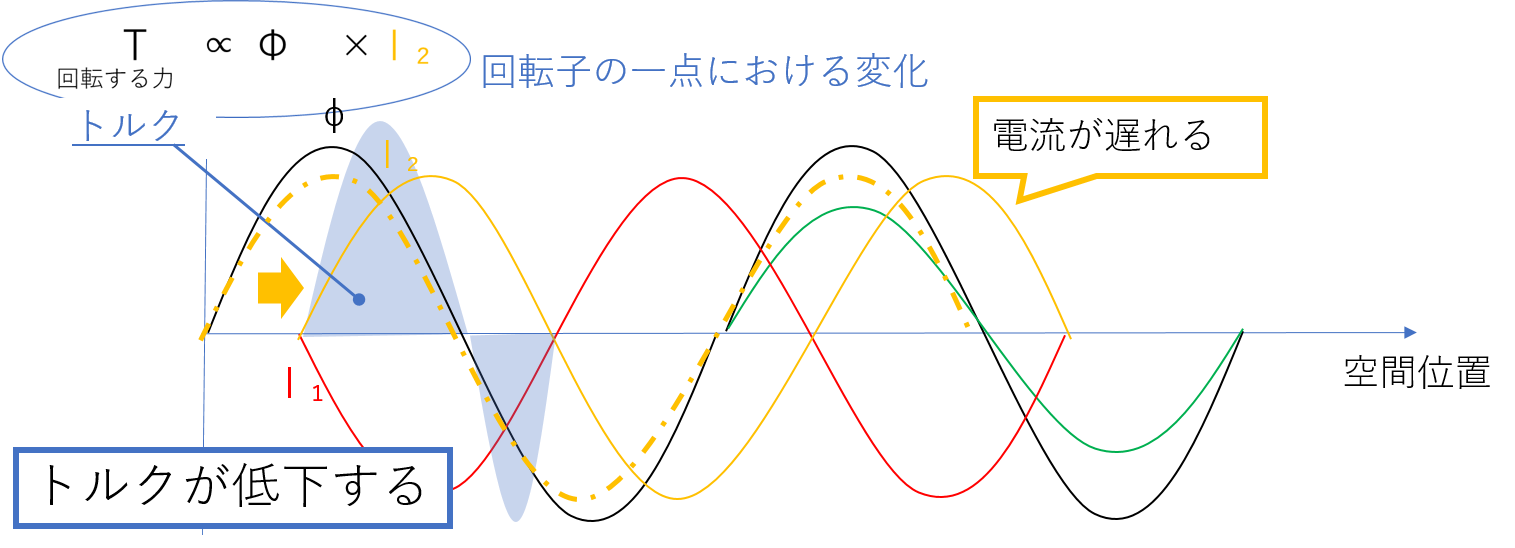
トルク電流は以下のように回転磁界の角速度ω₀に対し、回転子がωと角速度つまり回転が遅れることで発生する回転子の電流(二次電流I2)が、固定子巻線側(一次側)に影響することで発生する電流です。二次電流I2に対し同じ大きさで真逆の位相となります。
.gif)
回転子の電流(二次電流I2)を発生させる回転子導体の起電力(二次電圧V2)は、回転磁界が回転子導体を通過することで発生します。二次電圧V2は、回転子導体周辺の磁束の変化を打消すために発生するため、回転磁界Φが回転子導体を通り過ぎる速度(ω₀-ω)と回転磁界Φの積で決まります。(E=vBl,起電力=速度×磁束×導体長さ と同じ原理です)、

回転子の電流(二次電流I2)は、この回転子導体で発生する二次電圧V2を回転子導体の抵抗r2で割ることで求められます。

したがって、一次側のトルク電流は、以下のように、それに-をかける(逆位相にする)ことで求まります。

ただし、回転子の電流(二次電流I2)から固定子巻線(一次側)に流れる電流に変換する際は、回転子の位置がどこの位置にいるかによって、三相に分かれた各固定子巻線にそれぞれ流れる電流の比率が異なります。そのため、回転子の電流(二次電流I2)を固定子巻線(一次側)に流れる電流へ変換させる際に、回転位置の情報が必要となります。
インバータのベクトル制御では、以上のように求められた界磁電流とトルク電流から、それぞれの目標回転数に近づけるための必要な電流の大きさと位相決定し、合成させてインバータから流すことで、誘導機の最大限度のトルク発揮させて回転数を精密に制御しています。

参考にした資料、本
エネルギー管理士試験(電気) 30年度
誘導機・同期機器ともにかなり詳しい範囲まで記載されています [改訂版]徹底解説 電動機・発電機の理論
![]()
個人的にお勧めの書籍
数式が少なく、絵での解説が多いため、初心者にとって物理イメージから入りやすい本です 最新版 モータ技術のすべてがわかる本 (史上最強カラー図解)。

コメント